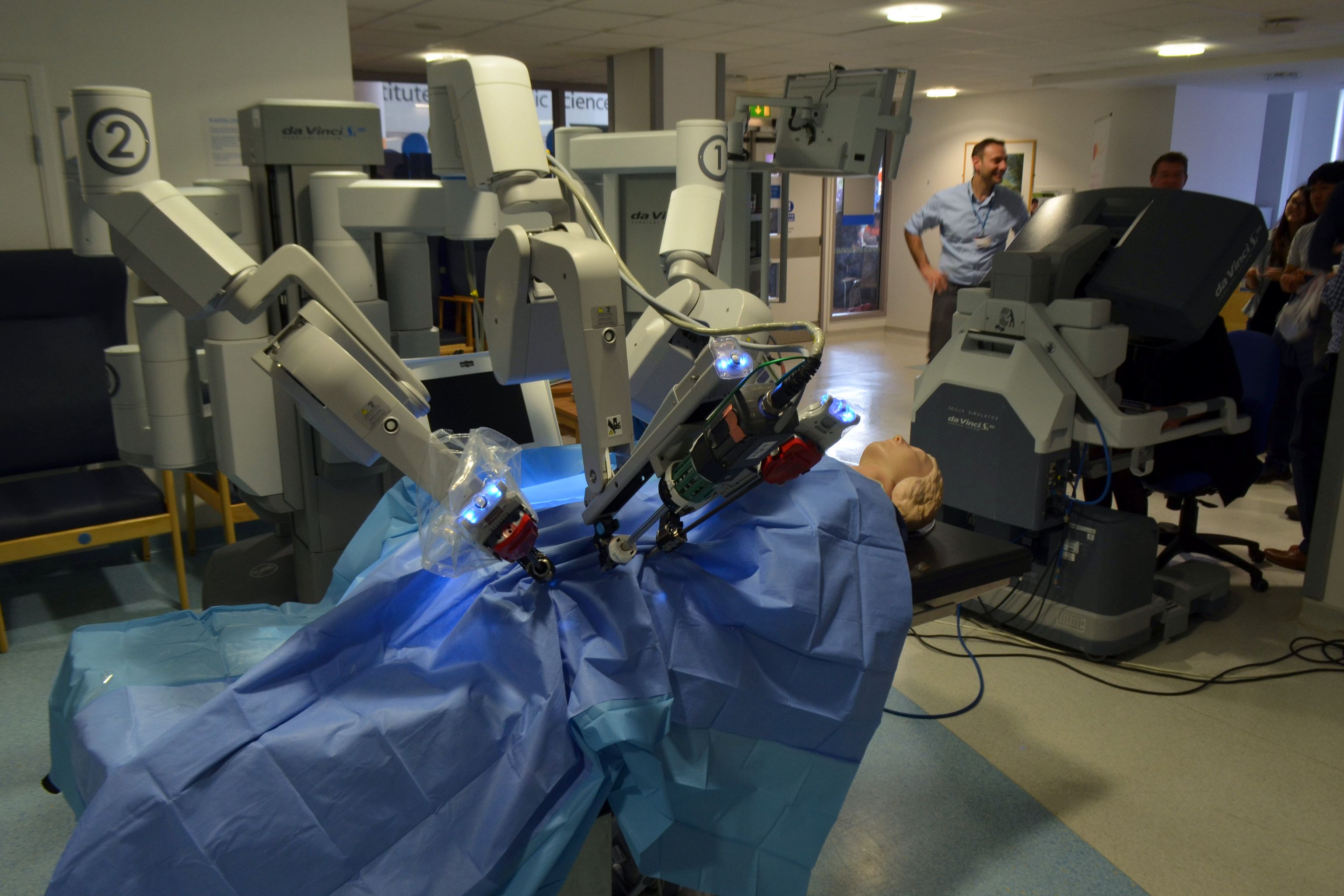
ダ・ヴィンチ・システム
導入実績:da Vinciについて 日本ロボット外科学会 J-robo
日本・・・ 228台
世界・・・3,745台
http://j-robo.or.jp/da-vinci/nounyu.html
『医療の歴史 穿孔開頭術から幹細胞治療までの1万2千年史』 スティーブ・パーカー/著、千葉喜久枝/訳 創元社 2016年発行
ロボットと遠隔医療 (一部抜粋しています)
1927年に最初の大西洋横断単独無着陸飛行を成し遂げたチャールズ・リンドバーグにちなんで、「リンドバーグ手術」という名で呼ばれた。この手術をNYから遠隔で指揮したヨーロッパ遠隔手術研究所の所長のジャック・マレスコーは次のように述べた。「外科処置のグローバル化のために礎を築き、外科医が、世界のどこにいる患者に対しても手術をおこなえると想像するのを可能にした」。
リンドバーグ手術はZEUSと呼ばれる、外科医の手の動きによって制御される、3本の腕をもつ遠隔操作のロボットシステムを採用した。ZEUSの2本の腕が腹腔鏡を含め手術器具をつかみ、もう1本がAESOP(内視鏡自動定置システム)と呼ばれる腹腔鏡保定装置を支えている。腹腔鏡は長く細い管で、照明とカメラとさまざまな手術器具――鉗子、グラグ、クラッシャー、刃、焼灼器など――を備えていた。腹壁の小さな切開部分から患者の体内に挿入される。腹腔鏡検査は低侵襲手術、あるいはMIS――「栓孔手術」とも呼ばれる――の一例で、大きく切開する従来の手術法に比べ、組織の破壊や血液の損失、術後の痛み、回復に要する期間、瘢痕を大きく縮小する。AESOPは主として外科医が腹腔鏡を指導するのに役立つように設計されていたため、それ自体、コンピュータを使ったロボット手術の初期段階であった。AESOPとZEUSに続き、ダ・ヴィンチ・システムが2000年に登場した。もともとは戦場の状況に応用されたNASAの宇宙工学を用いて、ダ・ヴィンチ・システムは3本または4本のロボットアームを持つ。1本の腕が腹腔鏡と3D画面のための2眼カメラを備え、他の腕はさまざまな手術器具を持つ。その腕と手首には非常に多くの旋回軸と自在軸が活用されているため、どんな人間の腕よりも幅広い動きができる。外科医は手と足と頭と声を使って腹腔鏡と器具、画面、照明などを調節する。
・
2000年代、遠隔手術はより一段と高度なレベルに達した――触覚刺激感応、すなわち触覚フィールドバックである。ずらりと並んだセンサーが、手術器具を通り抜けるかすかな振動を検出し、組織の抵抗力や体液の滑りやすさなどの情報をもたらす。これが外科医の操縦装置に抵抗力の形でフィールドバックされることで、何が起こっているか外科医にうまく気づかせられるようになった。
コンピュータで管理されるロボットアシスト手術申請の数は増えている。子宮摘出などの婦人科処置、心臓弁と冠動脈バイパス、腫瘍の除去、そして神経外科はすべてこの方法で行われており、患者と外科医が遠く離れた場所にいる遠隔手術の形態も増えている。遠隔助言と遠隔指導により経験のある外科医が助言や指導し、さらには世界中の研修生に、彼らが動物やコンピュータでシミュレートされた仮想の患者、さらには(万全の安全策が講じられているのであれば)本物の患者で実際に練習する時に、補助することができる。また外科医同士で観察、援助し合い、個々の症例について議論し、知識を分かち合うことも可能である。